
 “Для этого я содержу опытных, хорошо оплачиваемых специалистов,
“Для этого я содержу опытных, хорошо оплачиваемых специалистов,
которые могут доказать все, что
угодно… Что люди ходят на руках
и люди ходят на боках.” Дон Рэба
Каких только маятников не бывает. Маятники Максвелла, Ньютона, Обербека и даже простые/математические, которые проходят в школе, говоря о гармонических колебаниях. В математических всё понятно, x~d2x/dt2 и удивляет разве что независимость периода от массы грузика.
А чтобы Вы сказали о перевёрнутом маятнике? Маятнике, у которого грузик устойчиво колеблется в верхнем положении?
В 1951 году, сидючи в опале на Николиной горе, Пётр Леонидович придумал, объяснил механизм работы и собрал такой маятник. (УФН 1951, май или https://ufn.ru/ufn51/ufn51_5/Russian/r515_b.pdf ). На Арнольда это произвело такое впечатление, что он не только написал и порешал соответствующие уравнения, но и не пожалел старой электробритвы, чтобы со второй попытки собрать такой же. Капица скромно написал: «После ознакомления на опыте с динамической устойчивостью маятника в перевёрнутом положении трудно не притти к выводу, что она так же поучительна, как и динамическая устойчивость волчка, и ей также следует занять почётное место в лектории на демонстрациях по механике.». А последняя опубликованная работа Челомея – В. Н. Челомей, Парадоксы в механике, вызываемые вибрациями, Докл. АН СССР, 1983, том 270, № 1, 62–67. У Челомея маятник мог как угодно орииентироваться относительно подвеса + отдельно у него в жидкости всплывали со дна тяжёлые и тонули лёгкие шарики .
Но вернёмся к Капице. Про параметрический резонанс все, кто на качелях качался, знают. Болтаем ногами в такт качелям, вовремя переносим центр тяжести и раскачиваем качели.

У Капицы грузик закреплён на жёстком стержне, эксцентрик вертикально с частотой ω заставляет двигаться точку подвеса, точку О . То что так энергию можно закачать понятно, но откуда устойчивость в верхней точке?
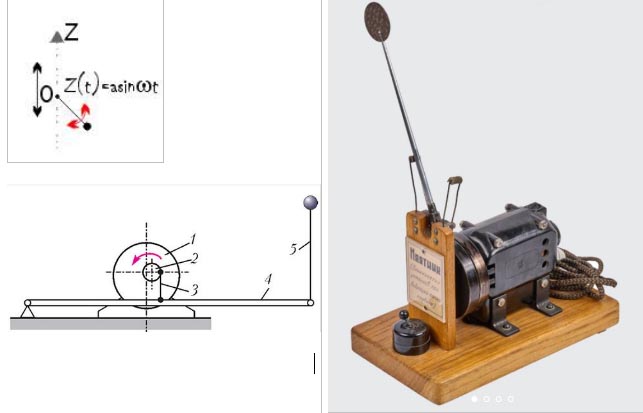
Для начала перейдём в системе отсчёта, в которой точка О неподвижна. В ней на маятник (грузик (подвес невесомый, трения нет)) действует сила инерции. F=−md2z/dt2=mω2z(t)
Теперь посмотрим, что происходит в невесомости (g=0).
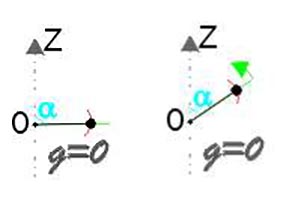
В невесомости направления +Z и – Z равноправны.
Ставим маятник «горизонтально» (рис. слева) и включаем мотор.
За период колебания в среднем на маятник будет действовать одна и та же инерциальная сила, направленная сперва вверх, а затем вниз. Таким образом, маятник будет колебаться лишь перпендикулярно оси движения подвеса, никуда не сдвигаясь (средний момент сил инерции за время колебания подвеса равен нулю, на ½ дуге +Z и на ½ дуге – Z) .
Поэтому, если начальное положение подвеса горизонтально (/2), при запуске мотора в системе координат связанной с О, маятник будет совершать колебания по симметричной дуге (помечена красным).
Пусть теперь начальное положение маятника определяется углом ≠/2 (рис.справа). Для произвольного значения синус несимметричная ф-ция, но тогда, за время одного колебания маятника средний момент сил, вращающих маятник по часовой стрелке, слегка больше, чем момент сил, вращающих против. Из-за этого ось равновесия (зелёная) будет медленно поворачиваться вверх — пока не станет вертикальной. Очевидно, что если бы начальный угол с вертикалью был бы тупой, то ось поворачивалась бы вниз.
Движение маятника, таким образом, можно разделить на две компоненты: быструю и медленную маятник будет быстро колебаться, меняя угол относительно некоторого временного равновесия, которое направлено под углом к вертикали, а сама ось будет из-за нескомпенсированного момента сил поворачиваться, чтобы стать вертикально.
Включение силы тяжести мало что изменит. В каждой точке траектории грузика добавится компонента F=mg, умноженная на синус угла, задающего мгновенное положение оси около которой колеблется маятник. Но, если эта сила (момент силы) будет меньше силы инерции маятник всё равно будет потихоньку подниматься пока не установится в верхнем положении.
При малых углах это даст условие равновесия «кверх ногами»: a2 ω2>2gL
Какая отсюда мораль? Маятник заведомо устойчивая, но неравновесная система. Приложив даже малые усилия, её можно заставить искать новые положения равновесия. Капица предложил свой маятник как модель для исследования режимов работы ускорителя. Похожие решения возникают на рынке при быстро меняющихся спросе/предложении.
«Сказка ложь, да в ней намёк»
PS Сейчас найдены решения, в которых поведение маятника становится хаотическим.
Спасибо. Интересно
Законы природы сложны, не так просто понять и описать! Спасибо, познавательно!